Gli ingegneri invece di un esoscheletro rigido hanno sviluppato il dispositivo plantare attivo utilizzando plastiche morbide e materiali compositi. I materiali morbidi, combinati con muscoli pneumatici artificiali (PAM), sensori leggeri e software di controllo avanzato, hanno reso possibile per il dispositivo robotico ottenere movimenti naturali della caviglia (vedi video).
Yong-Lae Park, assistente professore di robotica presso la Carnegie Mellon University, ha detto:
“Lo stesso approccio potrebbe essere utilizzato per creare dispositivi riabilitativi per altre articolazioni del corpo o anche per creare esoscheletri morbidi che aumentano la forza di chi lo indossa. Il progetto è stato descritto nella rivista Bioinspiration & biomimetica.
Il dispositivo robotico sarebbe adatto per aiutare le persone con disturbi neuromuscolari del piede e della caviglia associata a paralisi cerebrale, sclerosi laterale amiotrofica, sclerosi multipla, o ictus. In questi disturbi dell’andatura sono inclusi il piede cadente, in cui l’avampiede cade per debolezza o paralisi, e l’equinismo, in cui il movimento di flessione verso l’alto della caviglia è limitato. Le convenzionali cavigliere passive possono migliorare la deambulazione, ma l’uso a lungo termine può portare ad atrofia muscolare a causa del disuso.
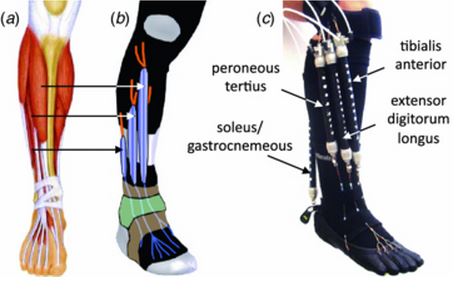
I dispositivi attivi alimentati sono in grado di migliorare la funzione e anche a rieducare il sistema neuromuscolare, ma la limitazione di un esoscheletro tradizionale è che limita i gradi naturali di libertà del corpo. La caviglia in modo naturale è capace di un complicato movimento tridimensionale, mentre gli esoscheletri più rigidi consentono solo un singolo punto di rotazione. Il dispositivo plantare morbido, invece, ha permesso ai ricercatori di imitare la struttura biologica della gamba. I tendini artificiali del dispositivo sono stati attaccati a quattro muscoli pneumatici artificiali (PAM), che corrispondono a tre muscoli della gamba anteriore e uno nella parte posteriore che controllano il movimento della caviglia. Il prototipo è stato in grado di generare una gamma di movimento sagittale di 27 gradi della caviglia, sufficienti per una normale deambulazione dei piedi.
Il compromesso, tuttavia, è che il dispositivo soft rispetto a un esoscheletro rigido è più difficile da controllare, ciò ha richiesto un sistema di rilevamento più raffinato per monitorare la posizione della caviglia e del piede e un sistema più intelligente per il controllo del movimento del piede.
Tra le novità del dispositivo l’utilizzo di sensori realizzati con una pelle artificiale sensibile al tocco e lastre di gomma sottili che contengono lunghi micro canali riempiti con una lega di metallo liquido: quando questi fogli di gomma sono allungati o pressati, le forme dei micro canali cambiano, a loro volta provocano variazioni nella resistenza elettrica della lega. I sensori sono stati posti sulla parte superiore e sul lato della caviglia.
E’ necessario un lavoro supplementare per migliorare la vestibilità del dispositivo, questo include muscoli artificiali meno ingombranti rispetto a quelli prodotti commercialmente utilizzati in questo progetto.
Il dispositivo deve ancora essere testato su pazienti per determinare le prestazioni come strumento riabilitativo.
Il progetto è stato finanziato dall’Istituto Wyss e la National Science Foundation”.


